Technik
Technik
Geomagnetik
Für die Kampfmittelerkundungs- und –beräumungsarbeiten kommen geomagnetische Detektionen mit Fluxgate-Magnetometern zum Einsatz. Das physikalische Grundprinzip bleibt bei unterschiedlichen Gerätekonfigurationen gleich.
Bei der Flächendetektion wird mittels einer entsprechenden Sonde eine zerstörungsfreie Messung unmittelbar über der GOK vorgenommen. Dabei werden weichmagnetische Kerne periodisch in die Sättigung getrieben. Die Kerne sind dabei von zwei gegensinnigen Empfängerspulen umwickelt, so dass in beiden Spulen in Abwesenheit eines Feldes sich die induzierten Spannungen aufheben. Liegt nun ein Magnetfeld an, was in unterschiedlicher Stärke bei einem im Boden befindlichen ferromagnetischen Gegenstand der Fall ist, so erzeugt die vektorielle Komponente in Richtung der Kerne ein resultierendes Signal in den Empfängerspulen, das proportional zum angelegten Feld ist. Die Messung der magnetischen Flussdichte erfolgt in Tesla (T) bzw. µT in verschiedenen Messstufen (Empfindlichkeitsstufen).
Ein Kampfmittel (Munitionskörper) im Boden bildet sich also als Veränderung der 0-Amplitude im +/-Messbereich im Sensorteil der Sonde ab. Die Veränderung kann zudem akustisch hörbar gemacht werden.
Die maximal zu erreichende Messtiefe (OFS) liegt, abhängig von Form und Größe der jeweiligen Anomalie sowie etwaiger störender Faktoren wie Oberbodenüberlagerungen, Bestandsbauwerke, Kabellagen, bei ca. 2,00 m.
Georadar
Einsatz von Georadar in der Kampfmittelsondierung
(Aus: Arbeitshilfen Kampfmittelräumung. – a.a.O. A-3.1.4.)
Die folgende Darstellung richtet sich in wesentlichen Teilen nach Knödel et al., 1997 und wurde für die speziellen Belange der Kampfmittelsuche ergänzt.
Das Georadar oder Bodenradar ist ein elektromagnetisches Impulsreflexionsverfahren (EMR), das auf ähnlichen Grundlagen wie die Reflexionsseismik und die Entfernungsmessung mit Sonar und Radar beruht.

Abb. A-3.1 – 38: Prinzipschema des Georadars (aus Knödel et al., 1997)
Es nutzt kurze elektromagnetische Impulse, die von der Oberfläche in den Untergrund abgestrahlt und nach der Reflexion an Schichtgrenzen und Objekten oder der Streuung an Einlagerungen wieder empfangen werden. Dabei werden die Laufzeiten und Amplituden der elektrischen Feldstärke dieser Impulse aufgezeichnet.
Reflexionen und Diffraktionen elektromagnetischer Wellen entstehen, wenn im Untergrund stärkere Kontraste in den elektrischen Materialeigenschaften auftreten. Dies betrifft Änderungen der Dielektrizitätskonstanten und der Leitfähigkeit. Die Dielektrizitätskonstante bestimmt die Ausbreitungsgeschwindigkeit der Radarwellen im Untergrund; die Leitfähigkeit die Dämpfung der Radarsignale.
Das Sende- und Empfangssignal wird durch breitbandige Dipolantennen abgestrahlt und empfangen. Die Arbeitsfrequenzen liegen bei geologischen und ingenieurtechnischen Aufgaben etwa im Bereich von 40 – 1200 MHz, für Materialprüfungen auch darüber. Die Ankopplung geschieht durch eine starke Änderung der Richtwirkung bei Auflegen oder der Annäherung der Antennen an den Boden. Eine hohe Pulsfolge der Sendesignale ermöglicht quasi kontinuierliche profilhafte Messungen mit bewegter Antennenanordnung (Abb. 1). Dabei sind Leistungen bis zu mehreren Kilometern pro Messtag möglich.
Der Vorteil des Verfahrens liegt bei geeigneten Untergrundverhältnissen in der zerstörungsfreien Anwendung mit einer sehr hohen horizontalen und vertikalen Auflösung sowie der Möglichkeit, die Messergebnisse in Echtzeit auf einem Monitor oder Profilschreiber als Radargramm darzustellen. In vielen Fällen ist bereits im Gelände eine vorläufige Interpretation und Aussage zur Aufgabenstellung möglich.
Die Arbeitsfrequenz, die meist als Mittenfrequenz fm eines durch die impulsförmige Anregung erzeugten breitbandigen Signalspektrums angegeben wird, lässt sich je nach der Aufgabenstellung und den Eigenschaften des Untergrundes in weiten Grenzen wählen. Wegen der kürzeren Wellenlängen besitzen hochfrequentere Messungen ein höheres Auflösungsvermögen. Die stärkere Beeinträchtigung höherfrequenter Signale durch Absorption und Streuung führt jedoch zu einer entsprechenden Verringerung der Erkundungstiefe.
Radargramme zeigen häufig durch die Vielzahl von Diffraktionshyperbeln ein kompliziertes Bild, dessen Interpretation große Erfahrung voraussetzt (Abb. 2). Meist wird aus der Lage des Scheitelpunktes der Hyperbel direkt auf die Lage des Diffraktionszentrums geschlossen (z. B. bei der Leitungs- aber auch Blindgängerortung).

Abb. A-3.1 – 39: Typisches Radargramm mit einer Vielzahl von Diffraktionshyperbeln, die auf lokale Störkörper im Untergrund schließen lassen. Die Daten wurden mit einer 250 MHz-Antenne aufgenommen
Die Daten profilhafter Messungen werden aufgrund der hohen Messpunktdichte oft als Graustufen- oder Rasterplots komprimiert dargestellt (Abb. 2). Zur Ergebniszuordnung sind ein Laufzeit- und ein Wegmaßstab sowie die Angabe des zeitlichen Nullpunktes, des Antennenoffsets, der Geschwindigkeits-Tiefenfunktion und/oder ein daraus abgeleiteter Tiefenmaßstab erforderlich. Die Ansprache von Horizonten und Objekten ist gut zu begründen.
Um die Interpretation von Radargrammen zu erleichtern, stehen eine Vielzahl von Datenbearbeitungsschritten (Filterung, Dekonvolution, Migration, etc.) zur Verfügung. Die Interpretation von Radarmessungen kann durch Modellrechnungen begleitet und überprüft werden.
Beispiel
Zur Erkennung und Unterscheidung von Objekten, die mindestens in einer Dimension kleiner oder vergleichbar zur Wellenlänge der eingesetzten Radarwellen sind, werden meist Diffraktionen genutzt. Diese Randbedingung ist bei der Ortung von großkalibrischen Kampfmitteln fast immer zutreffend. Da die Krümmung der Hyperbeln sowie die Amplituden und Phasen stark von der Messgeometrie abhängen, ist die Auswertung insbesondere bei inhomogener Umgebung nicht trivial und erfordert große Erfahrung. Das folgende Beispiel zeigt eine Georadarmessung, die zur Überprüfung einer magnetischen Anomalie diente. Das Objekt wurde in ca. 2,5 m Tiefe unter einem Kellerfundament vermutet. Es wurde eine 200 MHz-Antenne mit einer Reichweite von ca. 3 m eingesetzt. Die minimale Auflösung der Antenne beträgt ca. 0,05 m in 0,50 m Tiefe und 0,50 m in 2 m Tiefe. Zur Ortung des Objektes wurden 3 parallele Profile in Längs- und 3 Profile in Querrichtung gemessen. Der Profilabstand betrug 0,50 m.
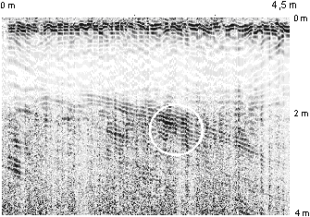
Abb. A-3.1 – 40: Ortung einer Fliegerbombe mit Georadar. Der eingekreiste Bereich zeigt die Reflexionen einer Fliegerbombe in ca. 1.80 m Tiefe
Es wurde ein Objekt in ca. 1,80 m Tiefe (Objektoberkante) geortet. Die Auflösung in Längsrichtung lässt eine Länge von 1,50 m vermuten. Die Auflösung in Querrichtung ist sehr schlecht. Daraus ist zu schließen, dass das Objekt im Grenzbereich von 0,50 m Ausdehnung liegt. Bei der anschließenden Bergung des Objektes wurde eine 250- kg-Bombe gefunden.
Eine Vorstellung der verwendeten Technischen Geräte sowie die Technischen Datenblätter sind im Anhang zu finden.